

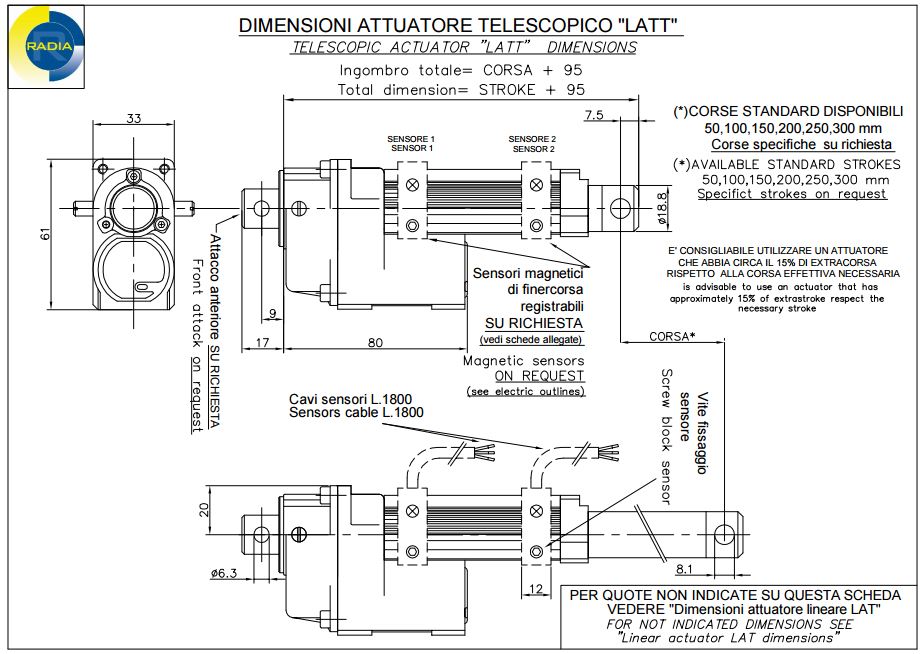
Liniowe siłowniki elektryczne – Seria LATT z tłoczyskiem
Siłowniki prądu stałego serii LATT to wykonanie z tłoczyskiem, czyli najbardziej “normalny” siłownik elektryczny. Jest to rozwinięcie siłownika typu LAT i ma identyczne zależności siła/prędkość. Elementem roboczym siłownika jest tłoczysko poruszane ukrytą wewnątrz nakrętką podróżującą wzdłuż śruby trapezoidalnej.
- siłowniki są dostępne na napięcie 12 lub 24V, lecz niektóre kombinacje siła/prędkość tylko 12VDC
- obudowa przekładni z aluminium
- mocowanie obudowy do konstrukcji do wyboru:
– ucho z otworem poprzecznym Ø 6,3 mm,
– boczne czopy Ø 6 mm do mocowania wahliwego
– w podstawie 4 otwory z gwintem M4 o głębokości 5 mm - zabezpieczenie termiczne PTC
- na życzenie: skok siłownika od 50 do 500 mm (co 50 mm!)
- na życzenie: skok siłownika może być większy niż 500 mm, ale pod warunkiem, że będzie występowała tylko siła ciągnąca!
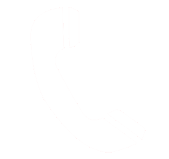
- na życzenie: magnetyczne wyłączniki krańcowe IP45
- na życzenie: sterownik elektroniczny do obsługi zailania i wyłączników krańcowych
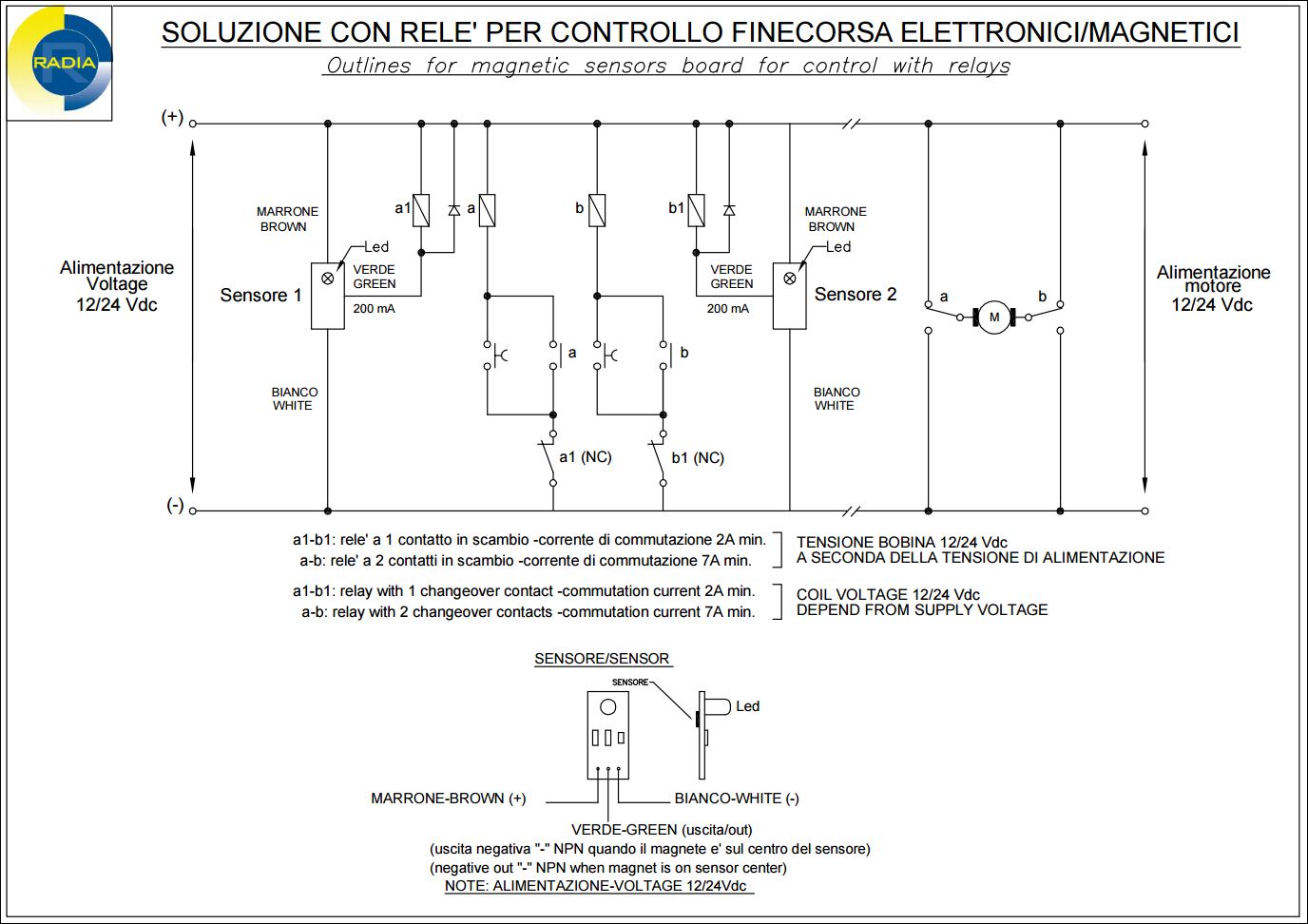
- na życzenie: 2-kanałowy enkoder inkrementalny
- standardowy skok gwintu śruby nośnej: 3 mm
- na życzenie możemy zastosować śrubę o skoku 10 mm, co 3-krotnie zwiększa prędkość i zmniejsza obciążalność siłownika
- zakres temperatur: -20 °C / + 80 ° C
- IP54
Model siłownika LATT o skoku 100 mm:
POBIERZ
Jak zamawiać siłowniki LATT:
LATT-1A/27/3-150-C-2M-E1 – przykładowy kod siłownika z silnikiem 1A, przełożeniem 1:27, śrubą o skoku gwintu 3 mm (100N i 8 mm/s przy 12V lub 200N i 16 mm/s przy 24V)
Kod siłownika nie zawiera napięcia zasilania, ponieważ ten sam siłownik można zasilać z 12V lub 24V. Wartości sił i prędkości w zależności od napięcia zasilania są podane w tabelach na dole strony.
- LATT – typ siłownika
- 1A – typ silnika (0.5A, 1A, 2A, 4A)
- 27 – przełożenie przekładni 1:27 (dostępne 1:12, 1:27, 1:48, 1:108)
- 3 – skok śruby w mm (3 mm lub 10 mm)
- 150 – skok siłownika w mm (50, 100, 150, 200, 250, 300, 350, 400, 450, 500 mm)
- C – rodzaj tylnego mocowania obudowy
do wyboru:
– A – ucho z otworem poprzecznym oczko Ø 6,3 mm (opcja)
– C – czopy boczne Ø 6 mm (standard) - 2M – dwa wyłączniki krańcowe:
– 1M = wyłącznik krańcowy 1 szt.
– 2M = wyłączniki krańcowe 2 szt.
– 3M = wyłączniki krańcowe 3 szt. - E1 – enkoder
– E1 = enkoder NPN, OPEN COLLECTOR – standard
– E2 = enkoder NPN, PULL-UP
– E3 = enkoder PNP, OPEN COLLECTOR
– E4 = enkoder PNP, PULL-UP
Uwaga: wersja PNP jest niedostępna dla silników z przełożeniami 1:108, 1:240 i 1:540.
Dostępne kombinacje siła/prędkość zależą od:
- typu silnika
- przełożenia przekładni
- napięcia zasilania
- skoku gwintu śruby
Kombinacje te są podane w tabelach poniżej:
(kliknij + aby rozwinąć spoiler)
* Jeżeli siłownik ma być tzw. samohamowny, czyli nie opaść pod ciężarem po wyłączeniu zasilania, musi być w wykonaniu ze śrubą o skoku gwintu 3 mm i o przełożeniu 1:48 lub większym. Samohamowne siłowniki zostały w tabelach zaznaczone gwiazdką.
Dodatkowo można nieco wspomóc samohamowność siłownika projektując układ zasilania tak, aby po odłączeniu napięcia następowało zwarcie biegunów silnika. W silnikach prądu stałego działa to jak hamulec magnetyczny.
Obrazowo: Przy doborze siłownika, np. do podnoszenia klapy, lepiej jest zaplanować punkt podparcia bliżej zawiasy i zastosować siłownik o większej sile i niższej prędkości i mniejszym skoku, niż oddalać punkt podparcia od zawiasy, zwiększając skok i prędkość.
{kind=link}
{kind=link}