
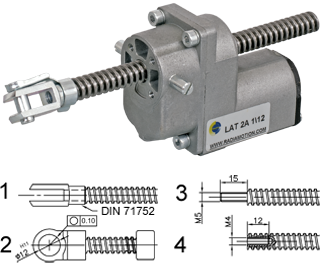
Liniowe siłowniki elektryczne – Seria LAT bez tłoczyska
Siłowniki prądu stałego serii LAT to wykonanie bez tłoczyska. Elementem roboczym siłownika jest śruba trapezoidalna o zmieniającej się długości, o odpowiednim zakończeniu, poruszająca element w urządzeniu Klienta.
- siłowniki są dostępne na napięcie 12 lub 24V
- obudowa przekładni z aluminium
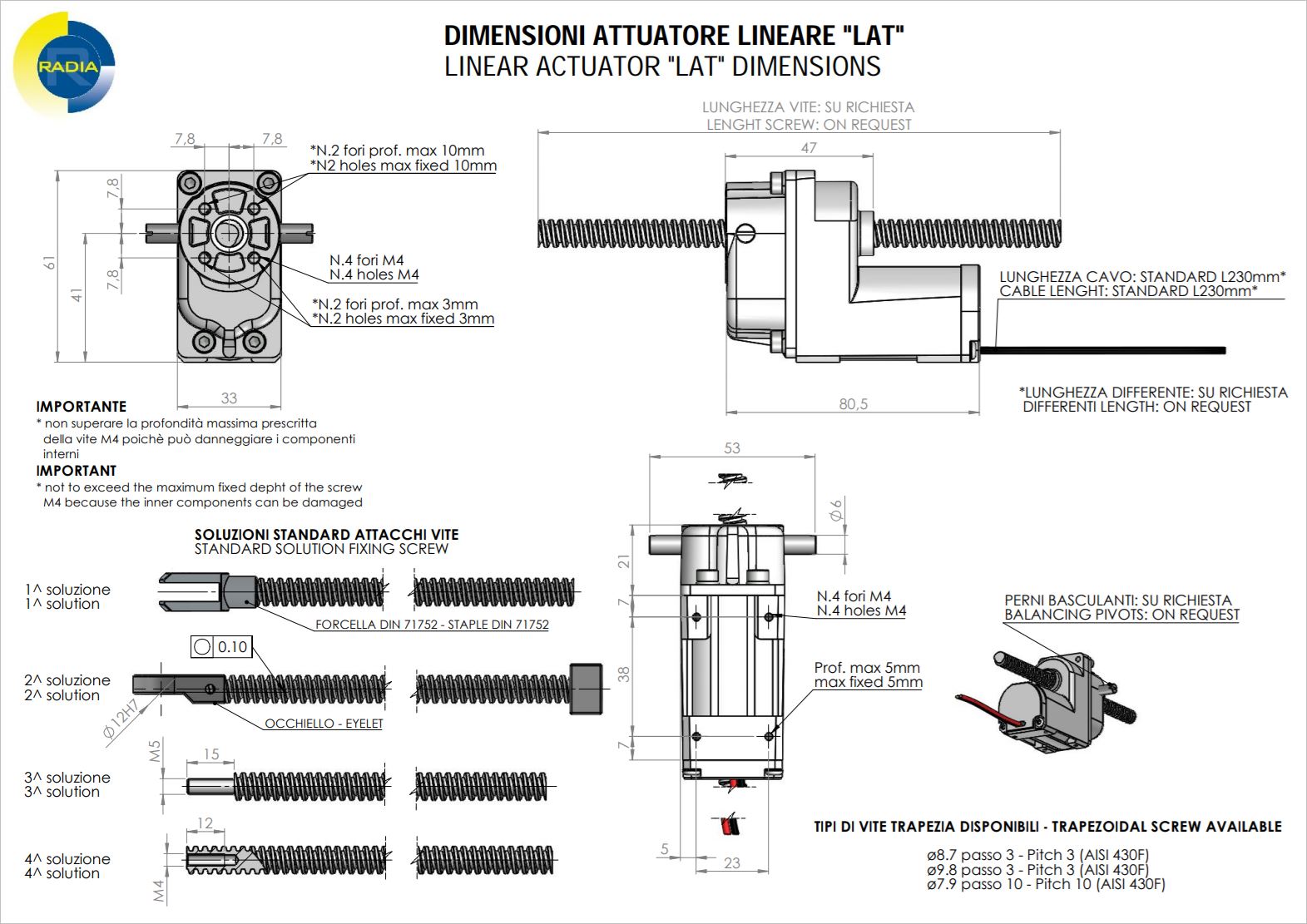
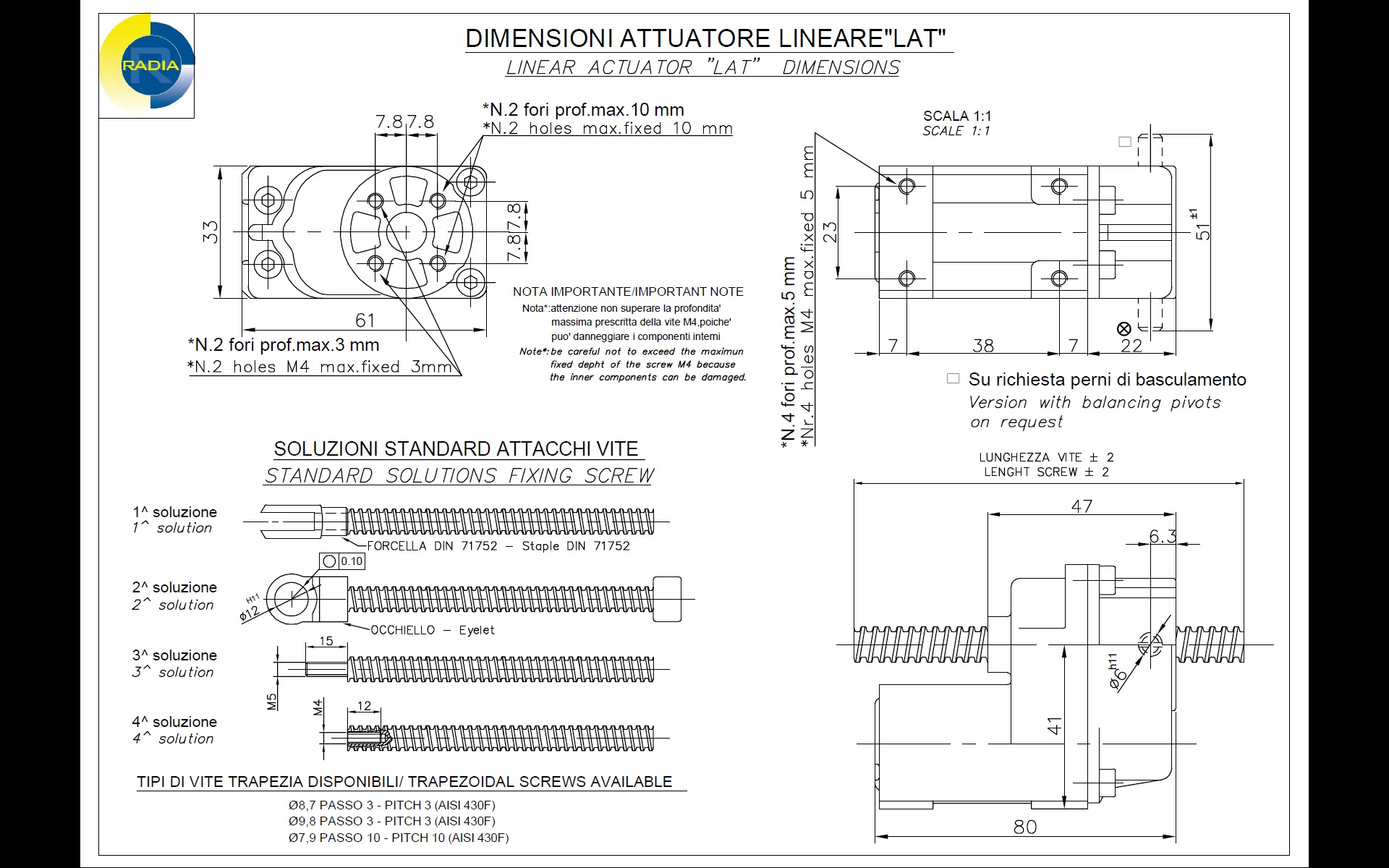
- mocowanie obudowy do konstrukcji:
– boczne czopy Ø 6 mm
– w podstawie: 4 otwory z gwintem M4 o głębokości 5 mm
– w kołnierzu: 4 otwory z gwintem M4: (2 o głębokości 10 mm + 2 o głębokości 3 mm)
Uwaga: W kołnierzu obudowy przekładni nie wolno użyć wkrętów dłuższych niż podana głębokość otworów z uwagi na możliwość uszkodzenia elementów wewnętrznych! (szczegóły na rysunku) - śruba trapezoidalna ze stali nierdzewnej AISI 430F
- zabezpieczenie termiczne PTC
- na życzenie: skok siłownika od 50 do 500 mm (co 50 mm)
- na życzenie: skok siłownika może być większy niż 500 mm, ale pod warunkiem, że będzie występowała tylko siła ciągnąca!
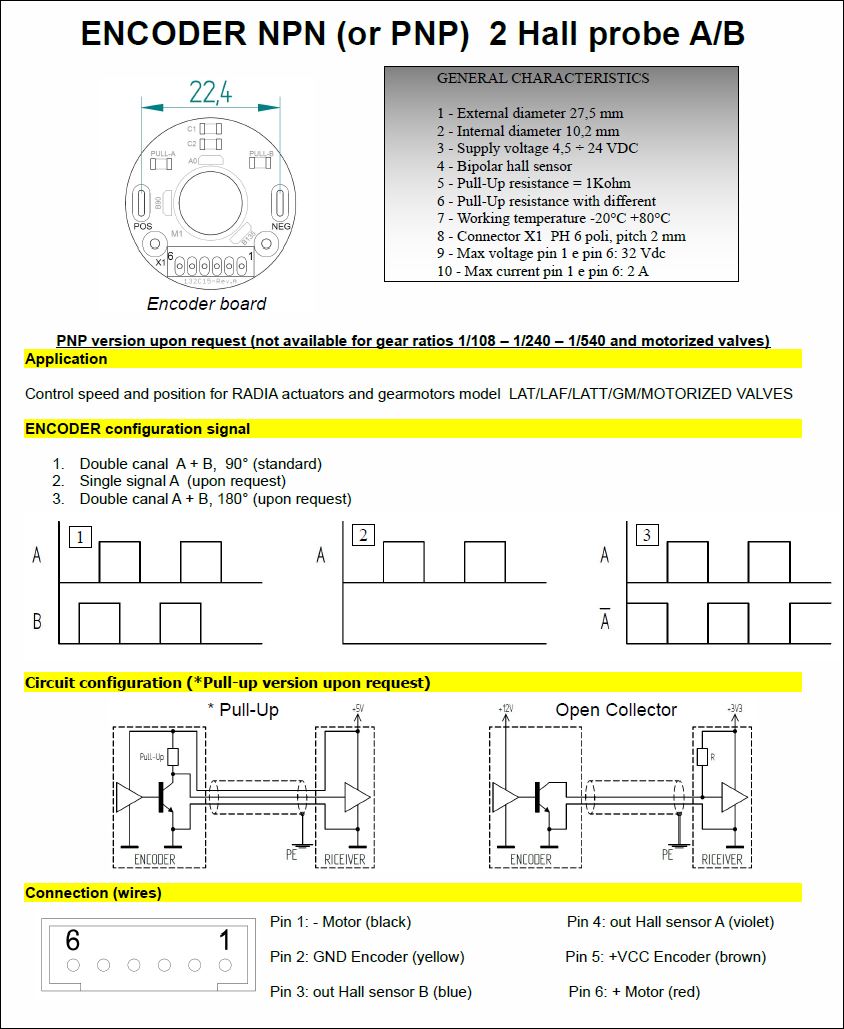
- na życzenie: enkoder inkrementalny NPN lub PNP (OPEN COLLECTOR lub PULL-UP)
Uwaga: Siłowniki z silnikami o przełożeniu 1/108, 1/240 i 1/540 mogą być wyposażone wyłącznie w enkodery NPN. Szczegóły w karcie katalogowej. - na życzenie: zakończenie śruby:
- oczko stałe fi 12 mm
- FORK z zabezpieczeniem (DIN 71752)
- gwint zewnętrzny M5
- gwint wewnętrzny M4
(szczegóły na rysunku)
- przód i tył śruby mogą mieć jednakowe lub różne zakończenia
- standardowy skok gwintu śruby nośnej: 3 mm
- dostępny również skok śruby 10 mm, co 3-krotnie zwiększa prędkość i 3-krotnie zmniejsza obciążalność siłownika
- zakres temperatur: -20 °C / + 80 ° C
- IP45
Model siłownika LAT o skoku 100 mm:
POBIERZ
Jak zamawiać siłowniki LAT:
(kliknij – aby zwinąć spoiler)
Dostępne kombinacje siła/prędkość zależą od:
- typu silnika
- przełożenia przekładni
- napięcia zasilania
- skoku gwintu śruby
Kombinacje te są podane w tabelach poniżej:
Tabela nr 1:
(kliknij + aby rozwinąć spoiler)
Tabela nr 2:
* Jeżeli siłownik ma być tzw. samohamowny, czyli nie opaść pod ciężarem po wyłączeniu zasilania, musi być w wykonaniu ze śrubą o skoku gwintu 3 mm i o przełożeniu 1:48 lub większym. Samohamowne siłowniki zostały w tabelach zaznaczone gwiazdką.
Dodatkowo można nieco wspomóc samohamowność siłownika projektując układ zasilania tak, aby po odłączeniu napięcia następowało zwarcie biegunów silnika. W silnikach prądu stałego działa to jak hamulec magnetyczny.
Obrazowo: Przy doborze siłownika, np. do podnoszenia klapy, lepiej jest zaplanować punkt podparcia bliżej zawiasy i zastosować siłownik o większej sile i niższej prędkości i mniejszym skoku, niż oddalać punkt podparcia od zawiasy, zwiększając skok i prędkość.
{kind=link}
{kind=link}
{kind=link}
{kind=link}